


Introduction to Model-Based Development using MATLAB and Simulink
RELATED RECENT PLACEMENTS

Anupama Yeragudipati
Kabira Mobility
Gurunanak Khalsa College


Arun Kumar
Riverstone
Anna University

Paul Willington
DGS Technical Services Pvt. Ltd.
SAVEETHA SCHOOL OF ENGINEERING ,CHENNAI
IVIN TROY
Kabira Mobility
College of Engineering and Management,Punnapra
Karuthapandi K
DGS Technical Services Pvt. Ltd.
S. Veerasamy Chettiar college of engineering and technology
Gowsikraj M
Hyundai Motor India Ltd
Sri krishna college of technology

Mujahidoddin Saudagar
Hyundai Motor India Ltd
G.H Raisoni college of engineering and management Amravati

Krutika Ravikumar
Genpact
R.V.College of Engineering
Syllabus
This course is full of best-in-class content by leading faculty and industry experts in the form of videos and projects
Course Overview
- Learn about the fundamentals of MATLAB, Simulink.
- Learn about Software Development Life Cycle related concepts incl Model based Design, Data Management, Embedded Code Generation, In Loop Validation etc.
- Implementation of control model of ADAS features.
Course Syllabus
On a daily basis we talk to companies in the likes of Tata Elxsi and Mahindra to fine tune our curriculum.
Week 1- Fundamentals & Basics of MATLAB scripting
- Introduction to MATLAB scripting and Syntax Basics
- Vectors, Matrices & Data Types in m-scripting
- MATLAB Operators, Decision Making Statements & Strings in m-scripting
- MATLAB Data Structures Overview & Cell Arrays in m-scripting
- Tables & Structures, MATLAB Functions & Callbacks in m-scripting
- File Handling Formats, Debugging & Flow Control Logics in m-scripting
- Block properties, Different Workspaces in m-scripting
- Programmatically accessing Simulink in m-scripting
Week 2- Simulink
- Introduction to Simulink & Simulink Toolbars
- Block Settings, Model Annotation, Simulink Solvers
- Sources & Sink Libraries
- Math Operations; Logical & Bit Operations
- Ports & Subsystems; Atomic Subsystems
- Masked Subsystem & Linked Libraries
- Continuous, Discontinuous & Discrete Blocks
- User-Defined Functions & Lookup Tables
- Mathematical Model Representation & System Models Creation in Simulink
- Stateflow-1
- Stateflow-2
Week 3- MATLAB Model-Based Development
- Overview of Automotive Industry
- Software Development demands of Automotive Industry
- Model Based Development in Automotive Industry & Model Based Development in MATLAB
- Requirement Analysis in Model Based Development
- Model Based Development Configuration Parameters Settings
- Creating Simulink Data Dictionary
- Accessing Simulink Data Dictionary & Port Property SettingsSignal Names & Signal Property Configuration
Week 4- Model Validation
In this week, the following topics are discussed:
- Model Simulation & Model Advisor Report
- Code Generation Settings, Auto-code Generation
- Overview of Model in Loop, Software in Loop & Hardware in Loop
- Testing Theory
- Test Report Analysis (Coverage Analysis & Different Techniques)
- Model in Loop Testing
- Software in Loop Testing
- Overview of Hardware in Loop Testing
Week 5- Advanced Driver Assistance System
- Introduction to ADAS & Levels of Autonomous Driving
- Overview to ADAS Features - 1
- Overview to ADAS Features - 2
- ADAS Project - Tilt & Telescopic Steering Column
- Requirement Analysis & Problem Understanding
- MATLAB Model Development of Tilt & Telescopic Function Feature
Our courses have been designed by industry experts to help students achieve their dream careers
Industry Projects
Our projects are designed by experts in the industry to reflect industry standards. By working through our projects, Learners will gain a practical understanding of what they will take on at a larger-scale in the industry. In total, there are 2 Projects that are available in this program.
Vehicle Direction Detection
During this project work, the students will develop a MATLAB Simulink model for detecting the direction of the vehicle based on the given requirements. The projects should be MBD compliant. A sample time of 0.01s should be chosen for all the signals.


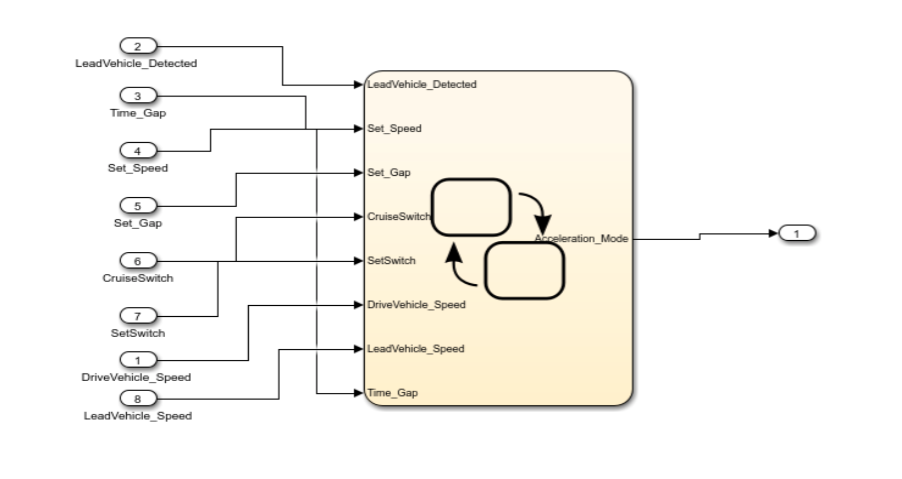
Adaptive Cruise Control
Our courses have been designed by industry experts to help students achieve their dream careers
Ratings & Reviews by Learners
Skill-Lync has received honest feedback from our learners around the globe.




Flexible Pricing
Talk to our career counsellors to get flexible payment options.
INR 40,000
Inclusive of all charges
Become job ready with our comprehensive industry focused curriculum for freshers & early career professionals
1 Year Accessto Skill-Lync’s Learning Management System (LMS)
Personalized Pageto showcase Projects & Certifications
Live Individual & Group Sessionsto resolve queries, Discuss Progress and Study Plans.
Personalized & Hands-OnSupport over Mail, Telephone for Query Resolution & Overall Learner Progress.
Job-Oriented Industry Relevant Curriculumavailable at your fingertips curated by Global Industry Experts along with Live Sessions.
Instructors profiles
Our courses are designed by leading academicians and experienced industry professionals.

1 industry expert
Our instructors are industry experts along with a passion to teach.

10 years in the experience range
Instructors with 10 years extensive industry experience.

Areas of expertise
- Electric vehicles
Find Introduction to Model-Based Development using MATLAB and Simulink in other cities
Pune
Delhi
Hyderabad
Mumbai
Bangalore
Chennai
Similar Courses
Got more questions?
Talk to our Team Directly
Please fill in your number & an expert from our team will call you shortly.