Modified on
State Space Representation

Skill-Lync

State-space models, as opposed to models that utilise one or more nth-order differential or difference equations, use state variables to describe a system by a collection of first-order differential or difference equations. The model is referred to as a linear state space model if the set of first-order differential equations is linear in the state and input variables.
Understanding State Space Representation
Below are some examples to understand the state space representation in detail.
Case-1: Calculate the stiffness of the suspension using the data, the load applied and deflection. Here it is very easy if you plot the graph between the load and deflection, the slope of the curve gives the stiffness. The stiffness value will not change with respect to time as it is time-in-variant.
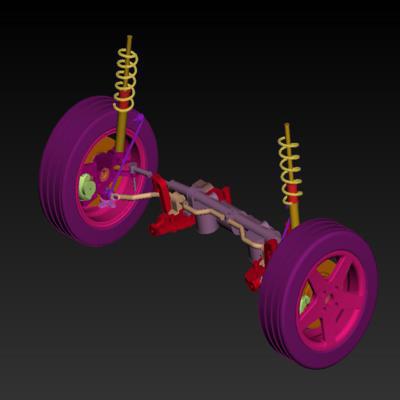
Case-2: Calculate the displacement and velocity of the wheel centre in the Quarter car model at various instances when it hits a bump and plots the graph with respect to time. In this case, first, you have to find the governing equation of the spring-mass system, then you can resolve the differential equation to find the outputs, such as displacement and velocity, at various time intervals and then make the plot.
To solve the differential equation and to get an array of output data(displacement and velocity) for the given input array(time), you have to define the data as a matrix.
Thus this arrangement of data and governing equation, as a matrix, is called State space representation. Here the nth-order differential equation will be represented as an ‘n’ first-order differential equation. Thus, it relates the input data with the output data in a matrix form.
Applications of State Space:
A differential equation governs all the systems in the universe. If you want to study the nature of any dynamic system, then this state space will help to resolve the governing ODE for the given inputs.
- Artificial Intelligence in the Autonomous car.
- Black-box modelling for Actuators in Robots and Aircraft.
The representation of State Space:
State Vector : X(t)= A x(t) + B u(t)
Output Vector: Y(t)= C x(t) + D u(t)
Where,
u(t) ⇒ Input Vector
A ⇒ State Matrix
B ⇒ Input Matrix
C ⇒ Output Matrix
D ⇒ Feedforward Matrix
Let’s see about this matrix in detail,
State Vector: X(t)
This vector is the derivative form of the parameter you must analyse in the dynamic state for a time. The number of variables in the state vector depends on the degree of the governing differential equation.
Example: Studying the Yaw rate and Lateral Acceleration of the steering system.
State Matrix: A
State Matrix defines the internal characteristics of the system, from the derived governing equation of the system, the parameters are extracted in such a way that, on performing the matrix multiplication, it contributes to the system's behaviour.
Input Vector: u(t)
- This vector is user-specified input to study the system.
Example: Steering input to the car by the user.
Input Matrix: B
- It is a matrix that defines the magnitude of the input given by the user.
Output Matrix: C
- This matrix determines what output is needed from the solved solution matrix X(t).
Example: From the state space solution, you will have a matrix as an output, where each element in the matrix denotes some output(yaw rate, lateral acceleration, etc) If you want to get the yaw rate alone, then you have to specify this matrix so that multiplying with the state vector X(t) gives yaw rate as an output.
Feedforward Matrix: D
- It adds some additional data to the output vector y(t). Since we are going to study the dynamic system, the inputs will also vary with respect to time, if you want to add that too in the output vector, for this the feedforward matrix is used. This is applicable only to the closed-loop system; for an open loop-system, there will be no feedback.
Author

Navin Baskar
Author
Skill-Lync
Subscribe to Our Free Newsletter

Continue Reading
Related Blogs
Learn how to render a shock-tube-simulation and how to work on similar projects after enrolling into anyone of Skill-Lync's CAE courses.
09 May 2020
In this blog, read how to design the frontal BIW enclosure of a car (Bonnet) and learn how Skill-Lync Master's Program in Automotive Design using CATIA V5 will help you get employed as a design engineer.
09 May 2020
Tetrahedral is a four- nodded solid element that can be generated through the tria element by creating a volume and also through the existing volume of the geometry. These elements are used where the geometry has high thickness and complexity. The image attached below is a representation of a Tetra element. The Tetra element will have 4 triangular faces with four nodes joining them together
01 Aug 2022
A connector is a mechanism that specifies how an object (vertex, edge, or face) is connected to another object or the ground. By often simulating the desired behaviour without having to build the precise shape or specify contact circumstances, connectors make modeling simpler.
02 Aug 2022
One of the most crucial processes in carrying out an accurate simulation using FEA is meshing. A mesh is composed of elements that have nodes—coordinate positions in space that might change depending on the element type—that symbolise the geometry's shape.
03 Aug 2022
Author
Skill-Lync
Subscribe to Our Free Newsletter
Continue Reading
Related Blogs
Learn how to render a shock-tube-simulation and how to work on similar projects after enrolling into anyone of Skill-Lync's CAE courses.
09 May 2020
In this blog, read how to design the frontal BIW enclosure of a car (Bonnet) and learn how Skill-Lync Master's Program in Automotive Design using CATIA V5 will help you get employed as a design engineer.
09 May 2020
Tetrahedral is a four- nodded solid element that can be generated through the tria element by creating a volume and also through the existing volume of the geometry. These elements are used where the geometry has high thickness and complexity. The image attached below is a representation of a Tetra element. The Tetra element will have 4 triangular faces with four nodes joining them together
01 Aug 2022
A connector is a mechanism that specifies how an object (vertex, edge, or face) is connected to another object or the ground. By often simulating the desired behaviour without having to build the precise shape or specify contact circumstances, connectors make modeling simpler.
02 Aug 2022
One of the most crucial processes in carrying out an accurate simulation using FEA is meshing. A mesh is composed of elements that have nodes—coordinate positions in space that might change depending on the element type—that symbolise the geometry's shape.
03 Aug 2022
Related Courses