


Path Planning & Trajectory Optimization Using C++ & ROS in Pune
RELATED RECENT PLACEMENTS

Anupama Yeragudipati
Kabira Mobility
Gurunanak Khalsa College


Arun Kumar
Riverstone
Anna University

Paul Willington
DGS Technical Services Pvt. Ltd.
SAVEETHA SCHOOL OF ENGINEERING ,CHENNAI
IVIN TROY
Kabira Mobility
College of Engineering and Management,Punnapra
Karuthapandi K
DGS Technical Services Pvt. Ltd.
S. Veerasamy Chettiar college of engineering and technology
Gowsikraj M
Hyundai Motor India Ltd
Sri krishna college of technology

Mujahidoddin Saudagar
Hyundai Motor India Ltd
G.H Raisoni college of engineering and management Amravati

Krutika Ravikumar
Genpact
R.V.College of Engineering
Syllabus
This course is full of best-in-class content by leading faculty and industry experts in the form of videos and projects
Course Overview
- The students will gain a thorough knowledge of Robot Motion Planning.
- During the coursework, the students will learn the following concepts:
- Configuration space for motion planning
- Random sampling-based motion planning
- Motion planning with non-holonomic robots
- Trajectory planning
- Reinforcement learning for planning
- During the coursework, the students will work on the Robot Programming Environment - ROS, Simulation Environment - RVIZ, and C++ Programming.
- The students are exposed to the modern trends and standard practices being followed in the industry right now.
- This course forms the foundation for anyone wanting to pursue a career in the domain.
Course Syllabus in Pune
On a daily basis we talk to companies in the likes of Tata Elxsi and Mahindra to fine tune our curriculum.
Week 1- Introduction
Robots are programmable machines that influence every aspect of a human's work and have a high potential to replace humans from performing a range of tasks. For example, it is becoming possible for computers to assist our daily driving. The topics include:
- Graph-Based Algorithms
- Breadth-First Search Algorithm
- Depth-First Search Algorithm
Week 2- Configuring Space for Motion Planning
In this week, the students will learn about C-Space i.e., Configuration Space. C-space is the space that provides possible positions for the robot to move. The topics include:
- How to Use the Configuration Space?
- Representing Configuration Space as a Graph
- Planning using Visibility Graph
- Finding the Shortest Path.
- Dijkstra’s Algorithm, A*, Bellman-Ford Algorithm
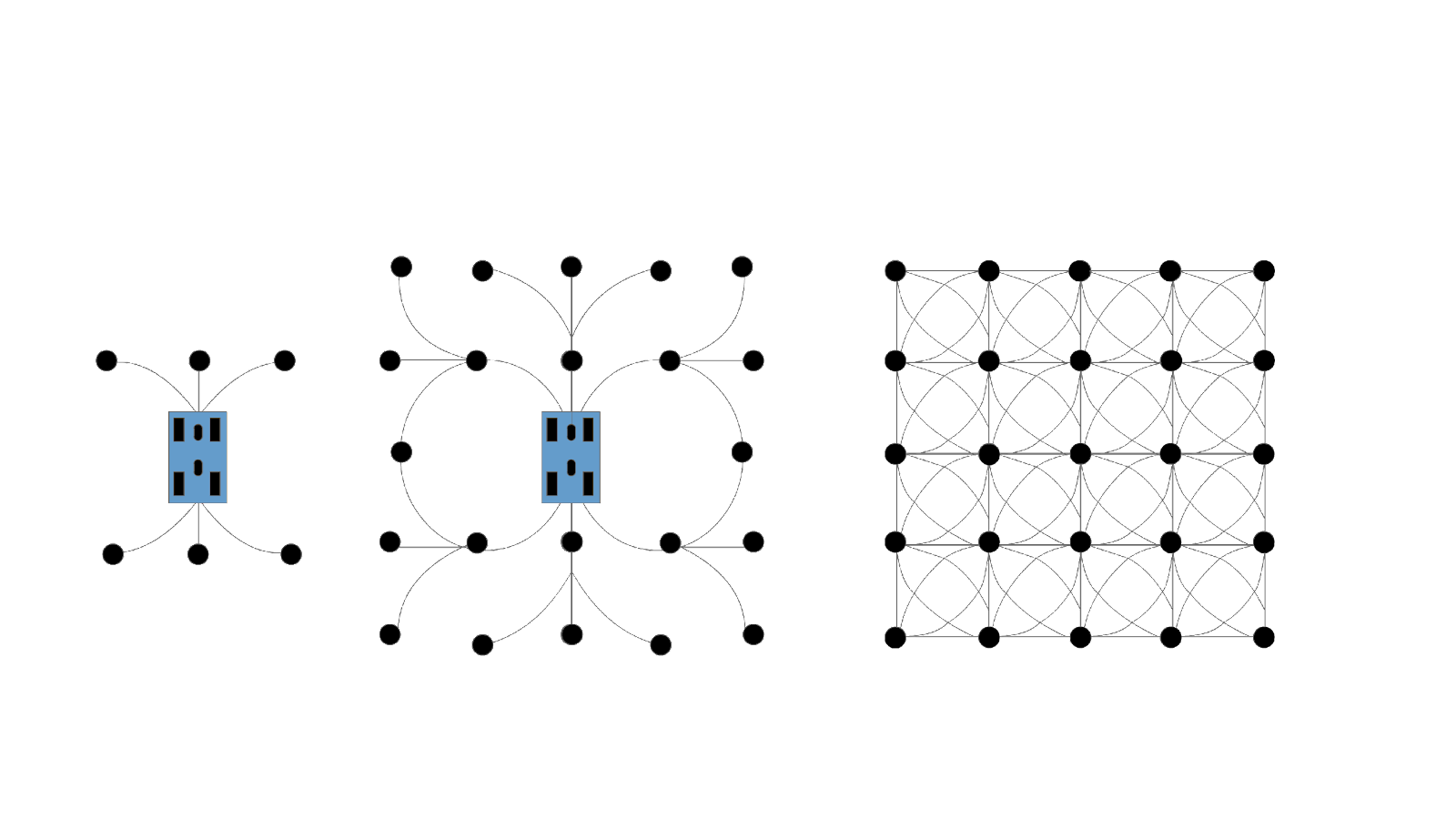
Week 3- Random Sampling-Based Motion Planning
In this week, the students will learn about sampling-based motion planning. This will solve the navigation queries. Instead of depending on the entire map of the C-space, the robot depends on the procedures that decide if the robot’s configuration is approaching an obstacle or not. The topics include
- Various Types of Rapidly Exploring Random Tree(RRT)
- Application of RRTs
- Path Planning using the RRT Algorithm
- Setting up the Ubuntu Environment
Week 4- Robot Operating System
In this week, the students will learn about ROS. ROS is a robotics middleware that manages the complexity and heterogeneity of the hardware and applications. Also, it performs low-level device control, implementation of commonly-used functionality, message-passing between processes, and package management. The topics include:
- Setting up ROS
- Following Instructions on the ROS Website
- Adding ROS to the Docker Container
- Introduction to Cmake
- Programming using ROS
- Introduction to 3-D Visualization Tool - Rviz
- Difference between
- ROS/RTOS
- ROS1/ROS2
- DDS
- Middleware
Week 5- Motion Planning with Non-Holonomic Robots
In this week, the students will learn about motion planning with non-holonomic robots. Non-Holonomic robots are built in such a way that they only travel in one direction along a given axis. To put it in simple words, Non-Holonomic robots can only move forward, backward, or sideways. The topics for this week include:
- Path and Speed Planning
- Trajectory Representations
- Splines
- Clothoid
- Bezier Curves
- Polynomials
- Introduction to Frenet Frame
- Planning in Frenet Frame
- Boundary Value Constraint Problem and Methods
- Pointwise Constraint Problem and Methods
Week 6- Mobile Robot Collision Detection
In this week, the students will learn about Mobile Robot collision detection. The robot will detect a collision and will change its trajectory to escape the contact as fast as possible and move away safely. The topics for this week include:
- Collision Detection for Static Obstacles
- Motion Prediction for Dynamic Obstacles
- Motion Prediction in Frenet Frame with Kalman Filters
- Collision Prediction for Dynamic Obstacles
Week 7- Hierarchical Planning for Autonomous Robots
In this week, the students will learn about Hierarchical Planning for Autonomous Robots. Hierarchical planning optimizes the global path and it requires only a considerable amount of time for the path replanning operations. The topics for this week include:
- Route Planning, A*, D*, D* lite
- HD Maps, SD Maps
- Behavior Planning - State Machines, Decision Tree, Behavior Tree, etc.
- Behavior and Motion Planning Integration
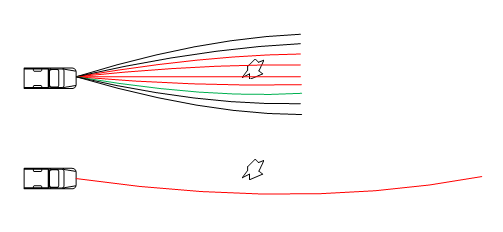
Week 8- Trajectory Planning
In this week, the students will learn about Trajectory Planning. Trajectory planning plays a major role in robotics and paves way for autonomous vehicles. It is basically the movement of robots from point A to point B by avoiding obstacles over time. The topics for this week include:
- Polynomial Planners
- Motion Planning with Differential Constraints
- Lattice Planners
- Collision Checking
- Trajectory Selection (Cost Functions)
Week 9- Planning Algorithm
The topics for this week include:
- Vehicle and Tire Model
- Optimal Control
- MPC Planners
Week 10- Planning in Unstructured Environments
In this week, the students will learn about planning in unstructured environments. Unstructured environments include off-roads, parking lots, etc. In such an environment, the robots should be able to identify the optimal path between the start and the goal path. So, for the robots to perform this, a suitable path planning algorithm is required. The topics for this week include:
- Unstructured Planner: Hybrid A*
- Parking Planner
- Automated Driving Open Research (ADORe)
Week 11- Reinforcement Learning for Planning
In this week the students will learn about Reinforcement Learning for Planning. Basically, it is a machine learning method that has increased applications in robot path planning. The robot will explore its surrounding environment and learn using the trial and error process. The machine learning method has an advantage in path planning and requires less prior information. The topics for this week include:
- Machine Learning
- Markov Decision Process
- Policy Evaluation
- Value iteration
- Reinforcement Learning
- On/Off Policy, Model-based/Model-free Monte Carlo
- Bellman Optimality, SARSA
- Q-learning, Epsilon Greedy
- Decision Making for AVs
Week 12- Conclusion
The topics for this week include:
- Overview of the Topics Learned
- Paper Review
- Non-Traditional Applications
Our courses have been designed by industry experts to help students achieve their dream careers
Industry Projects in Pune
Our projects are designed by experts in the industry to reflect industry standards. By working through our projects, Learners will gain a practical understanding of what they will take on at a larger-scale in the industry. In total, there are 2 Projects that are available in this program.
Design Implementation and Comparison of the Graph based Trajectory Planners

Trajectory Planning with Optimization Approach for Autonomous Car in Urban Area
Our courses have been designed by industry experts to help students achieve their dream careers
Ratings & Reviews by Learners
Skill-Lync has received honest feedback from our learners around the globe.




Flexible Pricing
Talk to our career counsellors to get flexible payment options.
INR 40,000
Inclusive of all charges
Become job ready with our comprehensive industry focused curriculum for freshers & early career professionals
1 Year Accessto Skill-Lync’s Learning Management System (LMS)
Personalized Pageto showcase Projects & Certifications
Live Individual & Group Sessionsto resolve queries, Discuss Progress and Study Plans.
Personalized & Hands-OnSupport over Mail, Telephone for Query Resolution & Overall Learner Progress.
Job-Oriented Industry Relevant Curriculumavailable at your fingertips curated by Global Industry Experts along with Live Sessions.
Instructors profiles
Our courses are designed by leading academicians and experienced industry professionals.

1 industry expert
Our instructors are industry experts along with a passion to teach.

4 years in the experience range
Instructors with 4 years extensive industry experience.

Areas of expertise
- RADAR
Find Path Planning & Trajectory Optimization Using C++ & ROS in other cities
Delhi
Hyderabad
Mumbai
Bangalore
Chennai
Similar Courses
Got more questions?
Talk to our Team Directly
Please fill in your number & an expert from our team will call you shortly.